在上一篇博文中,我给大家介绍了一种开发ROS工程的强大IDE——eclipse的配置方法。这篇博文,我继续给大家介绍另外一种更为轻量级更便捷的IDE——Qt的配置方法。
Qt的安装
下载安装程序
Qt,全称Qt Creator。exbot的ROS学习镜像集成安装了Qt,安装的是该镜像直接可以跳到配置阶段。如果镜像没有安装Qt,则需要按照以下步骤进行。
从Qt下载地址下载Qt的离线安装程序。如果是32位系统,则需要下载在线安装程序。
下载完成之后直接双击.run文件,进入图形安装界面,默认安装在/home/

按照指示一路Next即可完成安装。安装完成后点左上角的搜索,输入“ qt”如果看到 Qt Creator 图标则安装成功。

设置Qt快捷方式
这一步将要修改 Qt Creator 快捷方式,使从快捷方式启动 Qt Creator 的同时加载ROS环境变量。步骤和设置eclipse快捷方式相似,打开 terminal,输入下面的命令:
$ gedit ~/.local/share/applications/DigiaQtOpenSource-qtcreator.desktop
在打开的文本文件中,修改 Exec 那一行,在中间添加 bash -i -c。即修改后的那一行为:
Exec=bash -i -c
/home/<user>/Qt5.2.0/Tools/QtCreator/bin/qtcreator
注意: user 是你的用户名。
修改完成后,保存并退出。这样添加是为了在通过快捷方式启动 Qt Creator 的同时加载 ROS 环境变量(ROS 环境变量加载脚本配置在 ~/.bashrc 文件内)。
注意:如果打开的文件是空,则表示没有找到DigiaQtOpenSource-qtcreator.desktop文件,可能是安装路径不在本地用户目录下,或者版本不同导致的文件名不一致。可以在 ~/.local/share/applications/ 和 /usr/share/applications/ 两个路径下用$ls *qt* 命令找找看。
使用Qt开发ROS工程
这里我用 wiki 上的 TF 教程,创建一个 tf 的 broadcaster 为例,讲解如何用QT方便地建立工程。
创建工作空间和创建包的过程略过,我们在 learnin_tf/src 文件夹中创建一个 turtle_tf_broadcaster.cpp ,先什么都不用写,我们先改一下 CmakeLists.txt 。
在 CmakeLists.txt 中添加下面两行:
add_executable(turtle_tf_broadcaster src/turtle_tf_broadcaster.cpp)
add_executable(turtle_tf_broadcaster src/turtle_tf_listener.cpp)
target_link_libraries(turtle_tf_broadcaster ${catkin_LIBRARIES})
target_link_libraries(turtle_tf_listener ${catkin_LIBRARIES})
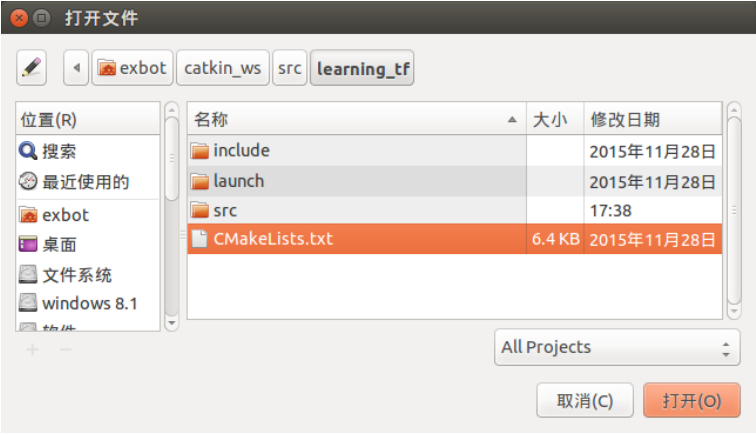
然 后 我 们 打 开 QT , 选 择 Open Project , 然 后 选 择 learning_tf/src 的 CMakeLists.txt,点击打开。
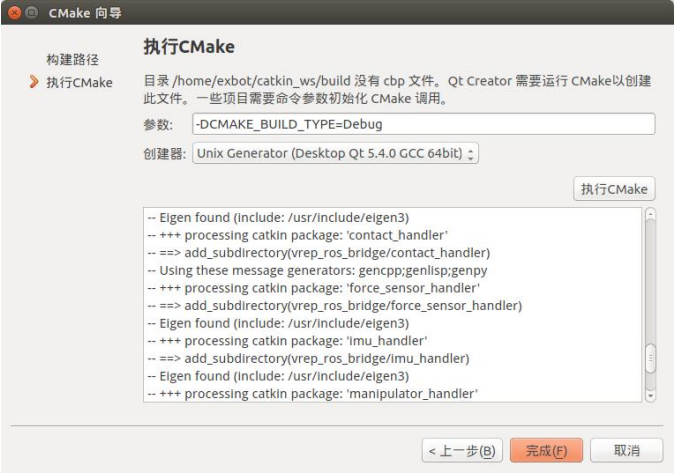
下一步,选择构建路径,注意构建路径选择工作空间的 build 文件夹,我这里是 catkin_ws/build 。参数需要填写 -DCMAKE_BUILD_TYPE=Debug ,否则无法调试。设置好了之后点击 执行Camke ,没有错误的话,点击完成即可。
打开项目之后,可以在左侧项目树中看到 src 文件夹和两个cpp文件。当然,目前这两个cpp文件都是空文件,现在我们就可以利用Qt的API补全功能来进行代码的编写了。

调试
在终端打开 roscore ,然后按F5开始调试,可以按 F9设置断点,按 F10单步 执行,F11进入函数。总之调试非常简单,不需要额外设置环境变量。
后记
工欲善其事,必先利其器。如果能够熟练地使用两种IDE其中的一种,对开发还是很有帮助的。