ROS的学习已经有一年了,大多数时间都在看wiki和各种书,真正动手的机会不多。在老师的带领下,我们就开始了搭建基于ROS的自主机器人平台的项目。接下来的一系列博文中,我会详细介绍从底层到通信层再到上层的架构方法,并且会穿插介绍调试校准的方法,希望对大家搭建自己的机器人有帮助。
摘要
此次开发的目的是针对履带式底盘开发出完整的自主导航机器人,机器人基于ROS架构,能够实现SLAM,目标识别,交互控制等功能。第一步,针对基于mbed的STM32F4系列控制器开发机器人底层功能,如:控速,反馈,里程测量等;第二步,利用rosserial完成上位机与控制器的通信,并且实现Navigation Stack所需接口;第三步,开发上层功能包,完成交互控制,自主建图,仿真等功能。第四步,针对特定要求,加入目标识别功能,加入GPS加强室外导航准度。

ROS Navigation Stack 简介
功能
Navigation Stack能够根据机器人的里程计数据,传感器数据完成自定位并测绘地图,还能做出路径规划使机器人安全地自主地抵达目标地点。
话题结构图解
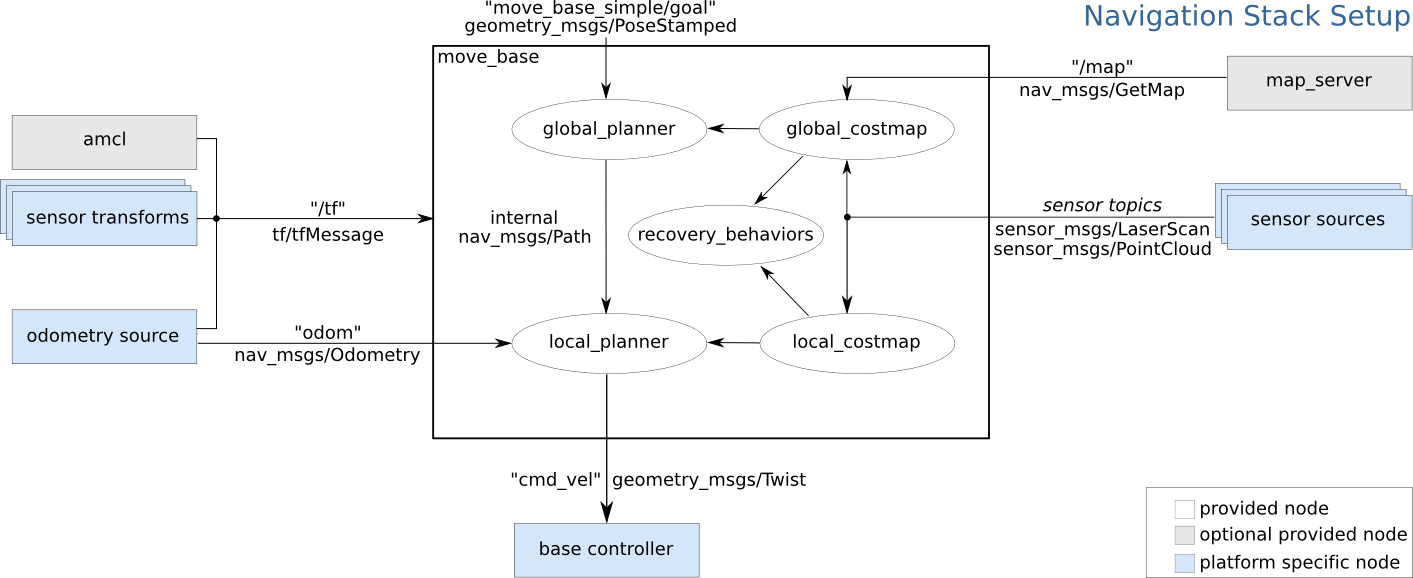
上图是Navigation Stack中各个包之间的话题关系。小方框和椭圆代表的是各个部件,箭头上标出了相连部件之间通信的话题名称以及消息类型。中间的大方框代表非常重要的move_base包,其中包含了全局地图,局部地图,全局路径以及局部路径,还有恢复机制,其中的结构我们暂时不需要了解。以大方框为界可以看到有五个话题输入(”tf”, “odom”, “/map”, “sensor topics”),一个话题输出(“cmd_vel”)。输入的话题对应着五个需要的接口:tf转换关系,odom里程信息,map地图数据,传感器数据;一个输出的话题即底盘的速度控制。
各个部件由不同的颜色划分重要级。白色 代表必需但已经实现的部件,灰色 代表可选且已经实现的部件,蓝色 代表必需并且是针对硬件平台的部件。所以底层开发至少需要实现以下功能:
-
解析cmd_vel话题数据,并将相应的速度命令送达给电机执行
-
将速度反馈累加,计算成odom里程信息,并传达给ROS上层
-
完成机器人的tf构建
-
发布必要的传感器数据,一般是激光数据(sensor_msgs/LaserScan),或者是点云数据(sensor_msgs/PointCloud)
底层必需的接口实现
接收 cmd_vel 话题,并将其转换为左右轮速
消息类型:geometry_msgs/Twist
消息格式:
geometry_msgs/Vector linear
geometry_msgs/Vector angular
说明:消息中 linear 和 angular 分别为线速度和角速度,都是3维向量,每一维分别表示x,y,z方向上的值。cmd_vel是 move_base 发布的速度控制话题,底层需要将其解析为左右轮速并转换成相应 PWM 信号发送给电机。
发布 odom 话题,提供粗略的里程信息
消息类型:nav_msgs/Odometry
消息格式:
std_msgs/Header header
string child_frame_id
geometry_msgs/PoseWithCovariance pose
geometry_msgs/TwistWithCovariance twist
说明:实现较为精准的自定位是一个很重要同时难度也很大的问题,Navigation中主要是由激光数据和底盘的里程数据来融合定位。计算里程信息需要将底层反馈的速度值积分得到实时的位姿和速度。 pose 表示的是实时的粗略的位姿, twist 表示的是实时的速度。 header 包含了时间戳,以及父坐标系等信息。 child_frame_id 表示子坐标系。
根据底盘配置Navigation Stack
TF 配置
系统在运行过程中必须知道各个坐标系之间的转换关系,这一部分由 TF tree 来管理。简单的实现方法是调用 robot_state_publisher 包,输入建模好的 urdf 文件,就可以自动往外广播 TF 消息。所以这部分主要工作在于 urdf 的建模。
传感器数据采集
这里的传感器指激光雷达或者深度相机。由于单片机的性能问题,这部分拿到上位机来做,主要是由相关设备的驱动来完成。所以选择设备时,最好选择有相应的ROS驱动的设备。这部分主要工作在于调试设备的参数。
多传感器融合定位
自定位是很重要的一部分,自定为的精度直接影响到建图导航的准确性。单靠一个传感器可能是不够的,尤其是采用 kinect 之类只有小角度的景深设备。这时候就需要用到多传感器融合的方法,ROS中提供了一个非常好的包—— robot_pose_ekf ,其利用扩展卡尔曼滤波,融合里程,激光,GPS数据来定位。这里的GPS是可选的。
调试方法
第一步:只调试底盘。包括测试底盘速度控制以及反馈速度是否准确, IMU , 码盘等机械参数设置等等
第二步:调试底层和上位机之间的通信,即 rosserial 的工作状况。有时候会产生数据量过大,波特率设置太小导致连接超时等问题。
第三步:确定底层和通信层无误后,针对环境要求,机械要求调试上层包的参数。
后记
有详细的计划之后,开发起来就不会浪费时间浪费精力。