将最近一段时间的问题和解决方法记录下来
Arduin & rosserial
Q:使用 Arduino Leonardo 和 rosserial 与上位机通信出现同步失败的错误提示。
A:
-
在 loop 函数最后,一定要调用 spinOnce 函数。
-
加上 #define USE_USBCON 编译预处理。
Q:使用 Leonardo 的定时器功能
A:
-
Arduino 官方库中没有定时器的接口,需要使用 TimerOne 库或者 MsTimer2 库,它们的区别是一个用了定时器1,一个用了定时器2。
-
Leonardo 板子中官方库函数中使用了定时器1,所以如果再使用 TimerOne 库,就会导致同步失败的问题或者一些不可预知的错误。推荐使用 MsTimer2 库
ubuntu
Q:永久提升用户权限为ROOT用户
A:
-
打开用户自动登录设置:System Settings -> User Accounts -> Automatic Login -> ON 。
-
执行
sudo gedit /etc/passwd。 -
将以用户名开头的那一行中的 1000 改为 0 ,重启。
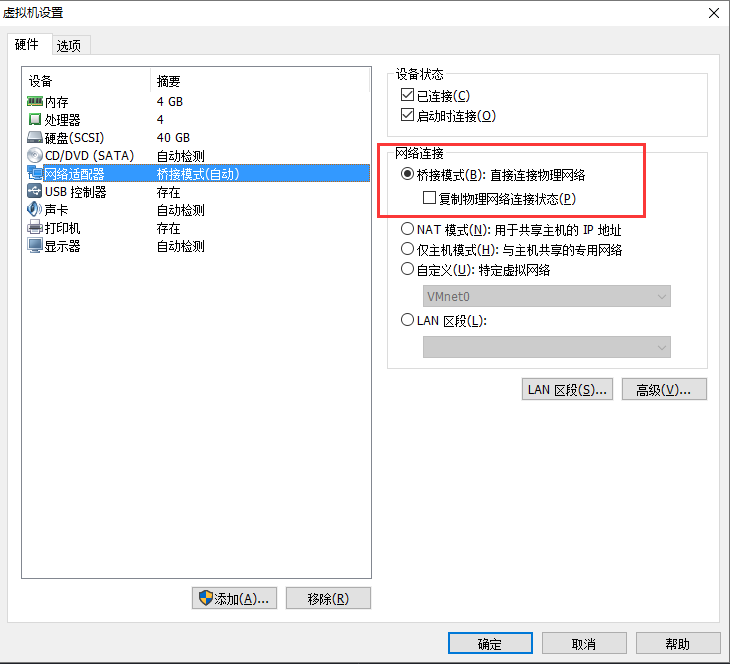
Q:VMware虚拟机网络桥接模式的设置
A:
-
打开虚拟机的网络编辑器:编辑 -> 虚拟网络编辑器 -> 更改设置。
-
选择 VMnet0 , 选择桥接模式, 桥接到主机所使用的网卡。如下图:

- 虚拟机 -> 设置 -> 网络适配器 -> 网络链接 -> 选择桥接模式即可。
Q:依赖包无法下载导致下载包失败
A:
-
更新软件源,推荐使用网易源或者中科大源
-
如果更新软件源之后也无法解决问题,一般是由于某个依赖包版本过高,而 apt 在解决依赖问题时只会安装未安装的包和升级旧版本的包,不会降级已安装的包。所以当需要安装的包依赖于某个低版本的包时,就会出现依赖包无法安装导致安装失败。
-
解决办法:用 apt-get install 下载无法安装的依赖包,直到出现 需要 XXX 是 xxx 版本,而已安装的是 xxx 版本,这样就可以定位到需要降级的包的名称和需要降级到的版本。
-
打开新立得包管理器(Synaptic Package Manager),搜索需要降级的包名,然后点击 Package -> Force Version , 选择 apt 提示的版本,然后点击 Apply 。最后安装时就不会出现依赖的问题了。

ROS & tk1
Q: 多机通信的设置
A:
-
连接同一个局域网,记录每台机器的IP
-
互 ping,保证两两之间可以ping通,注意:使用虚拟机时需要将网络设置为桥接模式,在同一个网段下才可以互ping成功。
-
选择一台机器作为主机(运行roscore),其他机器为从机,并在所有机器的 ~/.bashrc 文件末尾写入 export ROS_MASTER_URI=https://MASTER_IP:11311 。
-
在每台机器上的 /etc/hosts 文件中,加入以 IP 主机名 格式的标示。有几个机器就加几行。如下图:

Q: 使用 catkin 编译某一个包并下载
A:
-DCATKIN_WHITELIST_PACKAGES="package1;package2"
-DCMAKE_INSTALL_PREFIX=/opt/ros/indigo
Q: 查看 tk1 的 L4T 版本
A:
head -n 1 /etc/nv_tegra_release
Q: 报错:Jetson TK1 - modprobe: FATAL: Module nvidia not found.
A:
echo "alias nvidia nvhost_vi" >> /etc/modprobe.d/nvidia.conf
Q: 在 tk1 上编译 opencv2.4.12 并在编译选项中加入 cuda6.5
A:
cmake -DWITH_CUDA=ON -DCUDA_ARCH_BIN="3.2" -DCUDA_ARCH_PTX="" -DBUILD_TESTS=OFF -DBUILD_PERF_TESTS=OFF CUDA_GENERATION=Kepler ..
Q: 查看 opencv 版本
A:
pkg-config --modversion opencv
Q: 编译 rtabmap 配置 CMakeLists(在opencv2.4.12下)
A:
FIND_PACKAGE(OpenCV 2.4.12 REQUIRED QUIET)
INCLUDE_DIRECTORIES("/usr/local/include")
LINK_DIRECTORIES("/usr/local/lib")
Q: 使用双目相机跑 rtabmap
A:
-
相机坐标系与世界坐标系:相机坐标系是:x轴指向正右,y轴指向正下,z轴指向正前。而 rtabmap 需要的坐标系为世界坐标系,即:x轴指向正前,y轴指向正左,z轴指向正上。
-
利用 static_transform_publisher 发布坐标转换关系。绕x轴旋转-90°,绕z轴旋转-90°
<arg name="pi/2" value="1.5707963267948966" />
<arg name="optical_rotate" value="0 0 0 -$(arg pi/2) 0 -$(arg pi/2)" />
<node pkg="tf" type="static_transform_publisher" name="camera_base_link"
args="$(arg optical_rotate) base_link camera_link 100" />
Q: 在 rtabmap 中使用 SURF 算法
A:
<node pkg="rtabmap_ros" type="rtabmap" name="rtabmap">
<param name="SURF/GpuVersion" type="string" value="true"/>
</node>
Q: rtabmap 开启自定位模式,不建图
A:
<param name="Mem/IncrementalMemory" type="string" value="false"/>
Q: 查看 rtabmap 所有参数
A:
rosrun rtabmap_ros rtabmap --params-all
Q: 更改 rtabmp 显示参数
A:
修改 launch/rgbd_gui.ini 文件中对应参数。