ROS 中十分重要的包 pluginlib 的解释
概述
pluginlib 包提供了一系列工具使得 ROS 程序可以动态的加载或者卸载插件。这里的插件一般指动态库中的功能类,插件的目的往往是类似的,但是达到目的的算法却不尽相同,装载不同的插件就可以使程序获得不同的表现。为了方便, pluginlib 允许程序根据插件名以及插件注册的路径动态地加载。这一过程是不需要重新编译的,所以配合 ROS 的动态参数的机制,可以很容易的实现只更改参数文件中装载的插件名,就可使用不同的算法,从而达到快速地对比各个算法的优缺点,以及找到最合适某个场景的算法的目的。
插件的编写方法
pluginlib 利用多态的特性,不同的插件如果实现统一接口,便可以互相更换。用户在使用插件时,调用统一的接口函数,更换插件时,不需要更改程序,也不需要重新编译。
所以,使用 pluginlib 的编写插件的方法可总结为以下四步:
- 创建插件基类,统一接口。(若为现成的接口编写插件,则跳过该步)
- 编写插件类,继承插件基类,实现统一接口。
- 注册插件,并编译为动态库。
- 使插件可用于 ROS 工具链。
这篇博文中,我分别将两个int型的加法运算和乘法运算编写为插件,并使用动态参数修改得到不同的运算结果。
第一步:创建插件基类
创建 calculate_base.h 并声明插件基类 Calculate,定义接口函数,分别为 initialize 初始化函数,以及 result 运算函数。
namespace calculate_base
{
class Calculate
{
public:
virtual void initialize(int x, int y) = 0;
virtual int result() = 0;
virtual ~Calculate(){}
protected:
Calculate(){}
};
}
第二步:编写插件类
在 calculate_plugin.h 中,实现了两个插件类,分别是 Add 和 Multiply,它们均实现了基类 Calculate 的接口函数。这里为了方便,我将两个插件的实现写到了一个文件中,这并不影响它们成为两个插件,看完接下来的教程会发现,插件是基于类的,而不是基于动态库。
#include "calculate_base.h"
namespace calculate {
class Add : public calculate_base::Calculate
{
public:
Add(){}
void initialize(int x, int y)
{
this->x = x;
this->y = y;
}
int result()
{
return x + y;
}
private:
int x;
int y;
};
class Multiply : public calculate_base::Calculate
{
public:
Multiply(){}
void initialize(int x, int y)
{
this->x = x;
this->y = y;
}
int result()
{
return x * y;
}
private:
int x;
int y;
};
}
第三步:注册插件,并编译为动态链接库
插件的实现完成后需要利用 pluginlib 提供的宏操作来注册为可使用的插件,并且需要编译为动态链接库。
在 calculate_plugin.cpp 中, 利用 PLUGINLIB_EXPORT_CLASS 宏来注册插件类。
#include <pluginlib/class_list_macros.h>
#include "../include/plugin_test/calculate_base.h"
#include "../include/plugin_test/calculate_plugin.h"
PLUGINLIB_EXPORT_CLASS(calculate::Add, calculate_base::Calculate)
PLUGINLIB_EXPORT_CLASS(calculate::Multiply, calculate_base::Calculate)
使用 PLUGINLIB_EXPORT_CLASS 必须包含头文件 pluginlib/class_list_macros.h 。宏操作的第一个参数为插件类的全名,第二个参数为插件类的基类全名,这两个名字都 包括命名空间! 。
然后将其编译为动态链接库,在 CMakeLists.txt 中加入:
add_library(calculate_plugin
src/calculate_plugin.cpp
)
然后执行 catkin_make 就生成了动态链接库,默认生成库路径为工作空间下 devel/lib/ 文件夹。
第四步:使插件可用于 ROS 工具链
这一步需要编写 XML 文件,以便 ROS 工具链能够找到插件的路径。新建 calculate_plugin.xml 内容如下:
<library path="lib/libcalculate_plugin">
<class type="calculate::Add" base_class_type="calculate_base::Calculate">
<description>This is a add plugin.</description>
</class>
<class type="calculate::Multiply" base_class_type="calculate_base::Calculate">
<description>This is a multiply plugin.</description>
</class>
</library>
library 标签指出了包含插件的动态库的相对路径,这里为 lib 文件夹下名为 libcalculate_plugin.so 动态链接库,library 标签中省去了库的后缀 .so。
class 标签指出了期望从动态库中导出的插件类。各个参数的含义: type,指明插件类的空间名::类名。 base_class ,指明插件的基类的空间名::类名。 description ,插件的描述。name,使用包名+插件名的方法标识插件。
编写完 calculate_plugin.xml 之后,还需要在包含插件的包的 package.xml 添加下面一行:
<export>
<plugin_test plugin="${prefix}/calculate_plugin.xml" />
</export>
上面的标签名 plugin_test 必须是包含插件 基类 的包名, plugin 参数指明上面所编写的插件的 xml 文件。
到此为止,插件的编写编译注册已经全部完成,在 source 工作空间之后,执行一下命令,如果能看到插件的名称以及路径,就表明插件已经可以使用了。
rospack plugins --attrib=plugin pluginlib_test

注: pluginlib_test 为我的插件所在的包名,换成你想查找的包名,就可以查看这个包中的插件。
使用插件
plugin_loader.cpp :
#include <ros/ros.h>
#include <pluginlib/class_loader.h>
#include "../include/plugin_test/calculate_base.h"
int main(int argc, char** argv)
{
ros::init(argc, argv, "plugin_test");
ros::NodeHandle nh;
int x = 3, y = 5;
std::string cal;
if(!nh.getParam("/calculate", cal))
{
ROS_ERROR("Get calculate ERROR");
return 0;
}
pluginlib::ClassLoader<calculate_base::Calculate> calculate_loader("plugin_test", "calculate_base::Calculate");
try
{
boost::shared_ptr<calculate_base::Calculate> calculate = calculate_loader.createInstance(cal);
calculate->initialize(x, y);
ROS_INFO("Result : %d", calculate->result());
}
catch(pluginlib::PluginlibException& ex)
{
ROS_ERROR("The plugin failed to load for some reason. Error: %s", ex.what());
}
return 0;
}
下面是分段解释:
#include <pluginlib/class_loader.h>
#include "../include/plugin_test/calculate_base.h"
必须包含 pluginlib/class_loader.h 和插件基类的头文件。
pluginlib::ClassLoader<calculate_base::Calculate> calculate_loader("plugin_test", "calculate_base::Calculate");
构造一个 ClassLoader 对象去装载插件,两个参数分别为 1.插件所在包名;2.插件基类全名。
boost::shared_ptr<calculate_base::Calculate> calculate = calculate_loader.createInstance(cal);
calculate->initialize(x, y);
调用 ClassLoader 对象的 createInstance 函数根据 rosparam 设置的参数获得不同的插件的实例。最后调用相关方法,来得到结果。
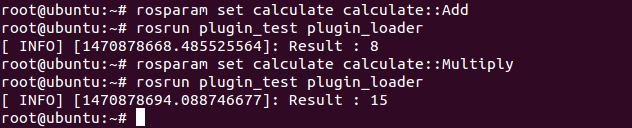
可以看到上图中,只设置的参数 calculate 的值便得到了不同的结果。即使用了不同的插件。
后记
记录了 pluginlib 的使用方法和机制,希望能够帮助到大家!