这篇博文介绍了有关 ROS 通信的包——nodelet的使用以及相关测试
概述
ROS,从软件构架的角度说,是一种基于消息传递通信的分布式多进程框架。ROS 进程之间的通信其实是基于标准的 TCP/IP 协议的,所以在传递 Messages 或者 Services 时,必须先经过一个打包的过程,而接收时也需要一个解包的过程,这些都会导致在传输过程中损耗不少时间。在数据量小,频率低的情况下,传输耗费的时间可以忽略不计。但当传输图像流,点云等数据量较大的消息,或者执行有一定的实时性要求的任务时,因为传输而耗费的时间就不得不考虑。
ROS 中需要有一个工具能够解决这个问题,nodelet 便诞生了。nodelet 的设计目的是提供一种方法,可以让多个算法程序在一个进程中用 shared_ptr 实现零复制通信(zero copy transport),以降低因为传输大数据而损耗的时间。
nodelet 设计目标:
- 使用现有的 C++ ROS 接口
- 允许 nodelet 之间进行零复制的传输
- 像插件一样不论时间先后动态的加载
- location transparent except for performance improvements
- 最小化 nodelet 的编程差异
运行机制
使用 nodelet 时,需要有一个 nodelet_manager 的进程来加载其他 nodelet 插件,而加载在一个 nodelet_manager 之中的 nodelet 之间就拥有零复制通信的条件。
编写方法
nodelet 是基于 pluginlib 插件机制的,对于不太熟悉 pluginlib 的读者,我推荐先浏览一遍我之前的博客: pluginlib详解
由于 nodelet 使用了插件机制,所以其使用方法和 pluginlib 的使用方法类似。具体使用方法有以下三步。
- 继承 nodelet::Nodelet 基类,并实现 onInit 纯虚函数,以用于初始化。
- 加入 PLUGINLIB_EXPORT_CLASS 宏将子类声明为插件类,并编译为动态库。
- 使 ROS 工具链可以找到相应的 nodelet 插件。
这篇博文中,我使用两个 nodelet 插件分别来发布和接收有五千万元素的 Int64MultiArray ,并记录了传输和接收的时间,在文章末尾进行了一个粗略的对比。
第一步:编写子类
pub_with_nodelet.cpp :
#include <ros/ros.h>
#include <nodelet/nodelet.h>
#include <pluginlib/class_list_macros.h>
#include <ecl/threads/thread.hpp>
#include <std_msgs/Int64MultiArray.h>
namespace nodelet_test
{
class Pub_nodelet : public nodelet::Nodelet
{
public:
Pub_nodelet()
{
}
~Pub_nodelet()
{
pub_thread_.join();
}
private:
virtual void onInit()
{
ros::NodeHandle& nh = getNodeHandle();
pub = nh.advertise<std_msgs::Int64MultiArray>("nodelet",1);
//ros::Subscriber sub = nh.subscribe("nodelet", 1, &Sub_nodelet::Callback, this);
pub_thread_.start(&Pub_nodelet::publish, *this);
}
void publish()
{
std_msgs::Int64MultiArrayPtr array(new std_msgs::Int64MultiArray);
array->data.resize(50000000);
for(double i = 0; i < 50000000; i++)
array -> data.push_back(std::rand());
int num = 1;
ros::Rate r(1);
while(ros::ok())
{
ROS_INFO(" %d ,publish!", num++);
pub.publish(array);
ros::spinOnce();
r.sleep();
}
}
ros::Publisher pub;
ecl::Thread pub_thread_;
};
}
PLUGINLIB_EXPORT_CLASS(nodelet_test::Pub_nodelet, nodelet::Nodelet)
以下是分段解释:
class Pub_nodelet : public nodelet::Nodelet
实现继承于 nodelet::Nodelet 基类的 Pub_nodelet 子类。
virtual void onInit()
{
ros::NodeHandle& nh = getNodeHandle();
pub = nh.advertise<std_msgs::Int64MultiArray>("nodelet",1);
//ros::Subscriber sub = nh.subscribe("nodelet", 1, &Sub_nodelet::Callback, this);
pub_thread_.start(&Pub_nodelet::publish, *this);
}
当 nodelet 插件类被 nodelet_manager 加载时,nodelet 插件类的 onInit 方法就会被调用,用于初始化插件类。 onInit 方法不能被阻塞,只用于初始化,如果 nodelet 插件需要执行循环任务,要将其放入线程中执行。
getNodeHandle 方法可以获得 nodelet_manager 的 nodehandle 。相应的 getPrivateNodeHandle 可以获得 private nodehandle 。
void publish()
{
std_msgs::Int64MultiArrayPtr array(new std_msgs::Int64MultiArray);
array->data.resize(50000000);
for(double i = 0; i < 50000000; i++)
array -> data.push_back(std::rand());
...
}
publish 线程中,我声明了 Int64MultiArrayPtr 类型的消息 array ,为了方便之后比较用与不用 nodelet 的差别,我压入了五千万个随机数。至于消息类型的后缀 Ptr,是消息类型的 shared_ptr,即共享指针,它是 roscpp 来对进程内实现零复制的一个优化工具。 shared_ptr 详情点击这里。
ROS_INFO(" %d ,publish!", num++);
每发布一条消息,使用 ROS_INFO 宏来打印时间和次序。
sub_with_nodelet.cpp :
#include <ros/ros.h>
#include <nodelet/nodelet.h>
#include <pluginlib/class_list_macros.h>
#include <std_msgs/Int64MultiArray.h>
namespace nodelet_test
{
class Sub_nodelet : public nodelet::Nodelet
{
public:
Sub_nodelet() :
num(1)
{}
private:
virtual void onInit()
{
ros::NodeHandle& nh = getNodeHandle();
//pub = nh.advertise<std_msgs::Int64MultiArray>("test",1);
sub = nh.subscribe("nodelet", 1, &Sub_nodelet::Callback, this);
//ros::spin();
}
void Callback(const std_msgs::Int64MultiArray::ConstPtr& msg)
{
ROS_INFO(" %d, subsrcibe!", num++);
}
private:
//ros::Publisher pub;
ros::Subscriber sub;
int num;
};
}
PLUGINLIB_EXPORT_CLASS(nodelet_test::Sub_nodelet, nodelet::Nodelet)
接收消息的 nodelet 插件,每接收到一条消息,就使用 ROS_INFO 宏来打印时间和次序。
第二步:编译为动态库
PLUGINLIB_EXPORT_CLASS(nodelet_test::Pub_nodelet, nodelet::Nodelet)
上述程序中的最后一行便是使用 PLUGINLIB_EXPORT_CLASS 宏来将所写子类声明为插件类的。第一个参数为子类命名空间::子类名,第二个参数为父类命名空间::父类名。
然后,在 CMakeLists.txt 中添加 add_library 和 target_link_libraries 编译选项,然后编译,在工作空间文件夹下的 lib 文件夹下会生成相应的动态库。
第三步:使 ROS 工具链可以找到相应的 nodelet 插件
这一步其实就是 pluginlib 的使用方法,不再赘述,不太明白的读者可以详读上面提到的博文。
pub_nodelet.xml :
<library path="lib/libpub_nodelet">
<class name="nodelet_test/Pub_nodelet" type="nodelet_test::Pub_nodelet" base_class_type="nodelet::Nodelet">
<description>
publisher nodelet.
</description>
</class>
</library>
sub_nodelet.xml :
<library path="lib/libsub_nodelet">
<class name="nodelet_test/Sub_nodelet" type="nodelet_test::Sub_nodelet" base_class_type="nodelet::Nodelet">
<description>
subscriber nodelet.
</description>
</class>
</library>
packgae.xml :
...
<export>
<nodelet plugin="${prefix}/pub_nodelet.xml" />
<nodelet plugin="${prefix}/sub_nodelet.xml" />
</export>
...
注意,这里的标签一定要是 nodelet 表明是用在 nodelet 包的插件!
使用方法以及效果对比
先开启名为 nodelet manager 的 nodelet_manager :
$ rosrun nodelet nodelet manager __name:=nodelet_manager
然后分别开启 sub_with_nodelet 和 pub_with_nodelet 。
$ rosrun nodelet nodelet load nodelet_test/Sub_nodelet nodelet_manager _output:=screen
$ rosrun nodelet nodelet load nodelet_test/Pub_nodelet nodelet_manager _output:=screen

可以看到,接收到的时间和发布的时间几乎相差无几,那么如果不使用 nodelet 进行传递五千万元素的数组呢,对比结果如下:(注:运行环境均一样,数据也是随机生成的五千万元素的数组)
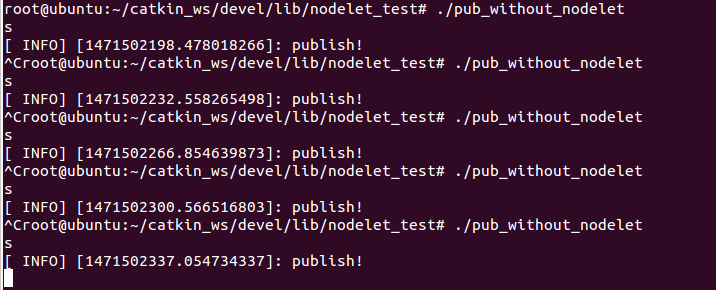
在不同进程使用 shared_ptr 进行发布和接收:
五次的发布时间:
五次的接收时间:
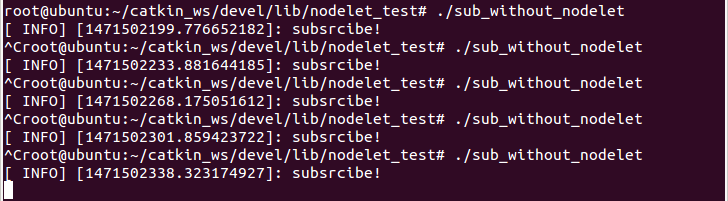
可以看到,在不同进程中就算使用了 shared_ptr 也是会进行拷贝传输的,时间损耗大概在 1.3s 左右。
[ INFO] [1471502198.478018266]: publish!
[ INFO] [1471502199.776652182]: subsrcibe!
[ INFO] [1471502232.558265498]: publish!
[ INFO] [1471502233.881644185]: subsrcibe!
[ INFO] [1471502266.854639873]: publish!
[ INFO] [1471502268.175051612]: subsrcibe!
[ INFO] [1471502300.566516803]: publish!
[ INFO] [1471502301.859423722]: subsrcibe!
[ INFO] [1471502337.054734337]: publish!
[ INFO] [1471502338.323174927]: subsrcibe!
在同一进程中使用 shared_ptr 进行发布和接收:
五次的发布和接收的时间:
可以看到,在同一进程中使用 shared_ptr 进行的是零拷贝复制,非常迅速,平均时间和使用 nodelet 相近。
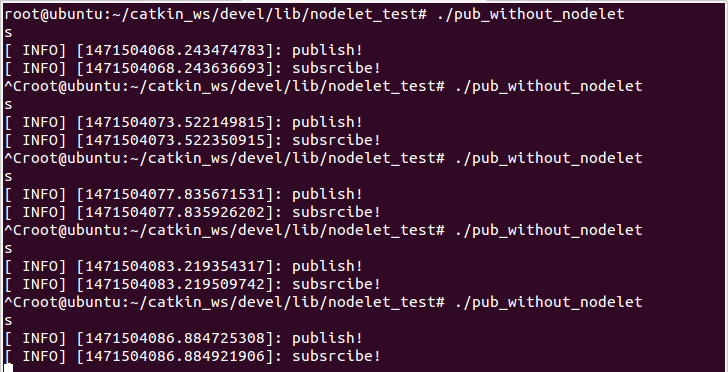
在同一进程中不使用 shared_ptr 进行发布和接收:
五次的发布和接收的时间:

可以看到,在同一进程中不使用 shared_ptr 进行的是拷贝复制,时间损耗也大概在 1.3s 左右,和在不同进程中分别发布接收的效果相同。
所以,运行时间的对比也证实了博文开头讲解的 nodelet 机制:其使用 pluginlib 动态插件机制,将不同的算法程序加载到同一个 nodelet_manager 进程中,使用 shared_ptr 来实现零复制通信,以降低因为传输大数据而损耗的时间。
后记
本篇博文讲解了 nodelet 的含义以及使用方法,希望能够帮到大家,如有错误请联系我!谢谢~