这篇博文给大家介绍ROS的重要IDE——Eclipse的配置方法。 ***
安装eclipse并配置启动文件
不能通过apt-get的方式安装,而需要在官网下载客户端,并做相关配置。下载地址:eclipse官网下载。(注意需要选择Eclipse IDE for C/C++ Developers 版本,并根据你的ubuntu系统选择32位或者64位)
下载完成后是没有产生启动图标的,在终端输入eclipse也会提示并没有安装。这时就需要创建一个启动图标,并设置参数。参考:eclipse启动图标文件配置
完成上述教程后,应该就会生成eclipse图标,点击就可以进入,但这样无法eclipse装载当前环境变量,所以还需要更改一行配置。
$sudo gedit /usr/share/applications/eclipse.desktop
将 Exec=/opt/eclipse/eclipse 这一行改为:
Exec=bash -i -c /opt/eclipse/eclipse
创建eclipse工程
执行以下命令,记得将 catkin_ws 替换成你想要导入eclipse的工程所在的工作空间名:
-
$ . ~/catkin_ws/devel/setup.bash -
$ cd ~/catkin_ws -
$ catkin_make --force-cmake -G"Eclipse CDT4 - Unix Makefiles" -DCMAKE_BUILD_TYPE=Debug -DCMAKE_ECLIPSE_MAKE_ARGUMENTS=-j8 .
将工程导入eclipse
打开eclipse,在导入项目之前先做一些设置。点击 Properties –> C/C++ Make Project –> Environment ,添加以下环境变量:
- ROS_ROOT
- ROS_MASTER_URI
- ROS_PACKAGE_PATH
- PYTHONPATH
- PATH
注意,这些变量最好是在终端中使用echo命令查看,直接复制即可。如:
- $echo ROS_ROOT
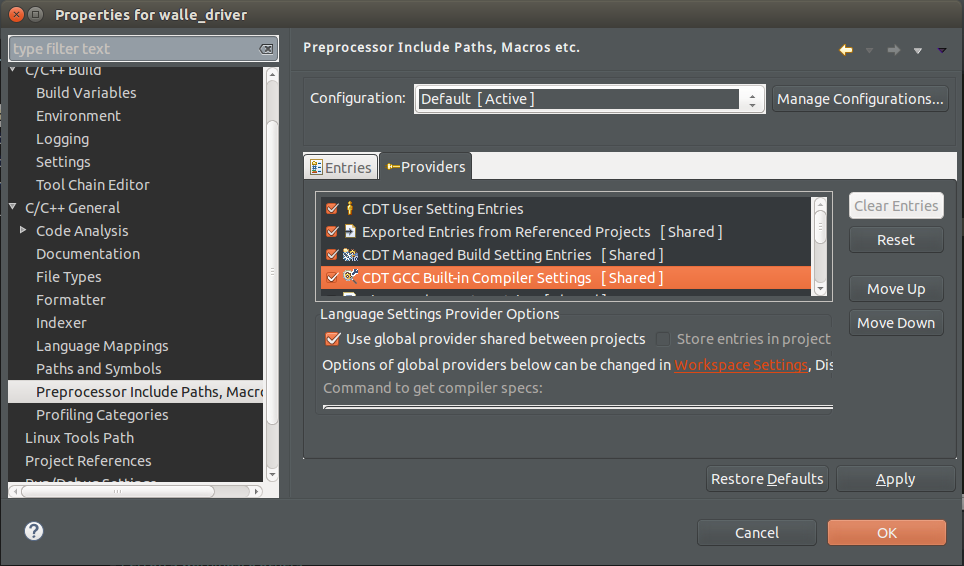
然后更改编译选项,选择 properties -> C/C++ general -> Preprocessor Include Paths, Macros etc,点击 Providers 标签,在 CDT GCC Built-in Compiler Settings [ Shared ] 选项打上勾。 如下图:
最后,点击 File –> Import –> Existing projects into workspace,记住,这里的选择的文件夹一定要是项目所在的工作空间的根目录!
项目导入完毕后,需要等待一会以便eclipse进行代码分析,在左侧即可看到项目的文件树结构。
调试运行
编译的时候像普通项目一样,如果语法有错误就会报错。运行错误则需要单步调试。
选择 Run –> Run configurations… –> C/C++ Application ,双击或者点击 New ,选择 Main 标签,点击 Search project 选择已经编译好的二进制文件,注意这里需要选择的是已经编译好的二进制文件,后缀是.bin,而不是源文件。
最后点击 Debug/Run 就可以在eclipse中调试,并且可以设置断点来检查程序的运行错误。
DIY eclipse代码格式以及配色
这个就不在赘述啦,网上有很多参考,在这里列出我觉得比较好的博文分享给大家。
Eclipse安装颜色主题,个性化你的IDE,让你的IDE焕然一新
后记
eclipse功能强大,但配置方法较为复杂,在编译调试基于ROS的程序时经常出错,解决这些问题又需要一定的编程基础。下一篇博文为大家介绍更为轻量级,更为简单的QT IDE。