参数是应用程序重要的组成部分,在机器人应用中,参数设置的合理性显得尤为重要。参数的选择不仅要考虑算法的运算速度、效果,还要根据机器人运行的实际环境做出相应调整。ROS中提供了的参数服务器机制,用户可以将参数以yaml文件格式保存在本地,程序运行时动态载入,修改参数并不需要重新编译。而且,ROS中更为人性化的一点就是支持程序运行时动态修改参数,实时的观测参数对运行结果的影响,极大地方便了参数调试。
召唤乌龟转圈圈!
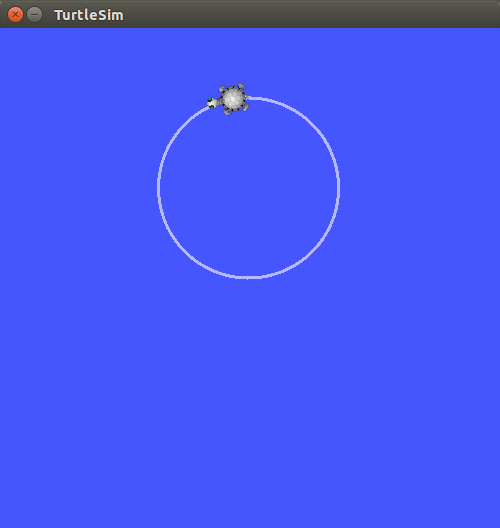
这篇博文中,我打算用经典的示例程序turtlesim来给大家演示ROS中参数的使用方法。turtlesim是ROS中一个教学程序,运行后窗口中会出现一个萌萌哒小乌龟,并且每次都不一样。小乌龟能接收geometry_msgs/Twist类型的话题,并缓慢移动起来。
我们先创建一个名为dynamic_turtle的包:
catkin_create_pkg dynamic_turtle rospy roscpp dynamic_reconfigure
然后在src文件夹中,创建一个名为circle.cpp的文件。代码如下:
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
int main(int argc, char **argv)
{
ros::init(argc, argv, "circle");
ros::NodeHandle nh;
geometry_msgs::Twist T;
if(!nh.getParam("/speed", T.linear.x))
{
ROS_ERROR("Get Speed ERROR");
return 0;
}
T.angular.z = T.linear.x / 2.0;
ros::Publisher twist_pb = nh.advertise<geometry_msgs::Twist>("turtle1/cmd_vel", 100);
ros::Rate rate(1);
while(ros::ok())
{
twist_pb.publish(T);
ros::spinOnce();
rate.sleep();
}
}
这一段简单代码的作用就是从参数服务器得到参数名为speed的参数值,并将其值赋给T.linear.x(线速度的X轴分量),然后T.linear.x的一半赋值给T.angular.z(角速度的Z轴分量),根据 r = v / w 可以知道乌龟的运行轨迹是绕定点做圆周运动,并且半径为2。
修改一下CMakeLists.txt,以便编译产生可执行文件:
add_executable(circle_node src/circle.cpp)
target_link_libraries(circle_node
${catkin_LIBRARIES}
)
这里可能有人疑惑了,参数服务器的speed从哪来呢,接下来我就给大家介绍两种最常用的设置参数方法。
launch文件的param标签
param标签提供了一种直白的参数设置方法,用户只需要在launch文件中添加即可。其格式如下:
<param name="parameter_name" type="double" value="10.0" />
name、type、value属性分别代表参数的名称、类型、值,类型有:str、int、double、bool,四种基础类型。
在包目录下建立launch文件夹(用文件夹区分文件是一个好习惯…),然后新建circle.launch。内容如下:
<launch>
<node name="circle_node" pkg="dynamic_turtle" type="circle_node"/>
<param name="speed" value="4.0" />
</launch>
这里设置了speed参数值为4.0,我们执行一下 catkin_make,然后分别运行以下两条命令(先开roscore):
$roslaunch dynamic_turtle circle.launch
$rosrun turtlesim turtlesim_node
可以在打开的界面中看到一个在做绕圈圈的乌龟~
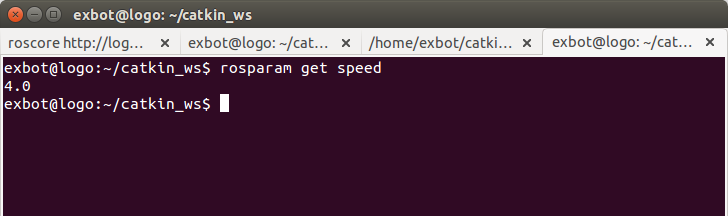
这时运行 rosparam get speed,可以在终端看到其值为4.0。
launch文件中的rosparam标签
rosparam与param的不同在于,rosparam可以导入.yaml格式的文件内容设置参数,在需要设置大量参数时,rosparam更加实用。yaml的语法十分简单,几乎就是 参数名:参数值 的形式。
rosparam标签的使用方法如下:
<rosparam command="load" file="$(find examle_pkg)/example.yaml" />
command属性为操作命令,load/dump表示装载和卸载yaml文件,delete表示删除参数。file属性为yaml文件的路径。(这里的 $(find examle_pkg) 表示的是examle_pkg包的路径,如果没有这个包就报错)。
首先新建名为param的文件夹,在文件夹中新建speed.yaml文件,并写入:
speed: 4.0
然后修改launch文件为:
<launch>
<node name="circle_node" pkg="dynamic_turtle" type="circle_node"/>
<rosparam command="load" file="$(find dynamic_turtle)/param/speed.yaml"/>
</launch>
再运行一遍launch命令和turtlesim可以看到和用param标签一样的效果。
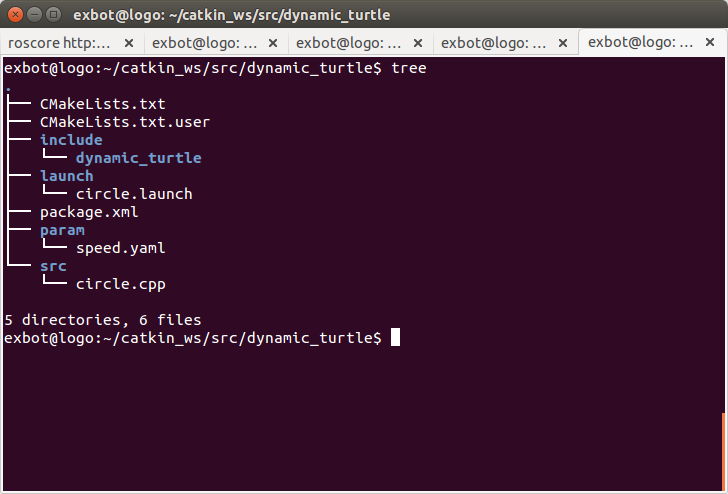
文件树结构如下:
获取参数的两种方法
ros::NodeHandle::getParam():
ros::NodeHandle nh;
std::string global_name, relative_name, default_param;
if (nh.getParam("/global_name", global_name))
{
...
}
// Default value version
nh.param<std::string>("default_param", default_param, "default_value");
第一个参数为参数名,第二个参数为接收参数值的变量名。如果获得参数值失败,则返回false。nh.param()函数可以设置一个缺省值,如果获取失败,则设置为缺省值。这种方式下如果想要获得私有参数,则需要声明一个私有NodeHandle。(如:ros::NodeHandle nh(~))
ros::param::get()
std::string global_name, relative_name, default_param;
if (ros::param::get("/global_name", global_name))
{
...
}
// Default value version
ros::param::param<std::string>("default_param", default_param, "default_value");
用法和用第一种相同。如果想获得私有参数则需要在参数名前面加上”~”。(例如:ros::param::get(“~private_name”, param);)
后记
这篇博文主要介绍了ROS中最常用的两种设置参数的方法,他们的共同点是不需要修改源代码,省去了重新编译的步骤。不同点是param标签适用更方便更直白,适合少量参数设置;rosparam需要配合yaml文件使用,更适合大量的并且成块的参数设置。下一篇博文我给大家介绍十分重要的动态参数设置。